
Many of the objects in everyday life are not flat, but have a three-dimensional structure. Almost all products need to be decorated in some way to make them attractive to buyers, and if the object needs to be decorated with anything more than simple colours, then printing is required. Printing onto three-dimensional objects is a real challenge, no matter what printing technology is used.
There are two alternative ways to place printed images onto objects. The image can either be printed directly onto the object, or an intermediate step can be used where a label, decal or transfer paper is printed, before transferring the image to the object. The decal approach has the advantage that a fairly conventional printing system can be used – the actual printing step is onto a flat surface and can even be printed continuously on a roll. The weakness of the approach is that the decal needs to be applied to the object to be decorated, and generally the only way to do this is by hand, which inevitably reduces throughput and increases costs. The profile of the surface to be printed is limited with decal printing, as the topology of the curved surface and the flat decal are incompatible unless the decal can deform to accommodate this. Alternatively, direct printing can be used, which allows for a simple automated printing process but limits the types of printing that can be used depending on the profile of the surface to be printed.
The most widely employed direct printing method for non-flat objects is pad or tampo printing; a form of indirect gravure printing. The image to be printed is defined with a metal printing plate or cliché, which is charged with ink. A soft silicone pad is then pressed into the cliché, taking up ink, and then pressed onto the object to transfer the image. Because of the softness of the pad, this method is able to tolerate a considerable degree of non-flatness in the printed product while still giving a good print. Pad printing performs well for printing simple coloured logos and text, but is a spot colour system so each additional colour needs an additional print, and is also not able to reproduce colour gradients. Of course, pad printing is also not digital – a new image design requires a new cliché and different ink colours, and so changing from one design to a new one requires significant setup cost and time.
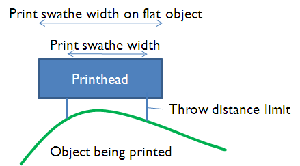
If digital product printing is required, to give the benefits of variable image/data printing, zero setup cost and time to allow mass customisation of products and printing on demand, the choice is between electrophotographic technology (laser printing) and inkjet printing. Laser printing only works with flat surfaces, and so this technology is limited to decal printing. Inkjet printing can also be used to print decals, but is applicable to direct printing of non-flat objects. In this case the printheads need to be moved over the object (or the object under the printheads), so that a path following the shape of the object is traced out. Because inkjet printing ejects drops which can travel some distance before landing on the substrate (up to 3-4 mm in the case of drop on demand inkjet, and several cm for continuous inkjet), a curved surface can be printed even though the printheads themselves have a flat profile. The diagram shows the principle, and means that the print swathe width is limited either by the width of the printhead or the maximum width that will keep the object within the desired distance from the printhead. For a typical drop-on-demand printhead, this distance may be as little as 1-2 mm for reproduction of sharp text, but could be 5 mm or more where less detail is required.
The next challenge is to find an accurate robot motion system that can move the printhead, or the object, with sufficient accuracy and repeatability to allow different colours to be aligned, and potentially for multiple print swathes to be aligned. Most robot systems define an accuracy with which they can move to a certain point in three dimensions, rather than the accuracy and uniformity with which they can trace the path required for printing, so a detailed understanding of the robot motion needs to be reached to get good results. Printing onto shaped objects can be achieved either by moving the printhead or the object, and the choice is driven by the type of object – if possible, stationary printheads are preferred as this removes the problem of maintaining good fluid flow to the printheads while they are moving in a complex manner. The stationary printhead configuration does limit objects to be printed to be of a reasonable size and shape so that they can be moved conveniently under the printheads, but is ideal for smaller objects such as cups, helmets and buckets.
Once the mechanical issues have been solved, software needs to be developed to move the robot in the correct path (based on a CAD model of the object shape) and to calculate the print swathes as outlined above. At present, only single swath printing has been achieved, but the technology exists for printing multiple swathes and covering entire three dimensional objects if desired.
Tim Phillips, Catenary Solutions